
Rotor antenowy azymut/elewacja
Celem projektu było zrealizowanie lekkiego rotora antenowego (w azymucie i elewacji), który może być używany na wyjazdach. W tym celu zastosowano obrotnicę do kamer przemysłowych zasilaną napięciem 24V AC (chińskiej produkcji), co sprawdziło się doskonale.
Szczegóy budowy
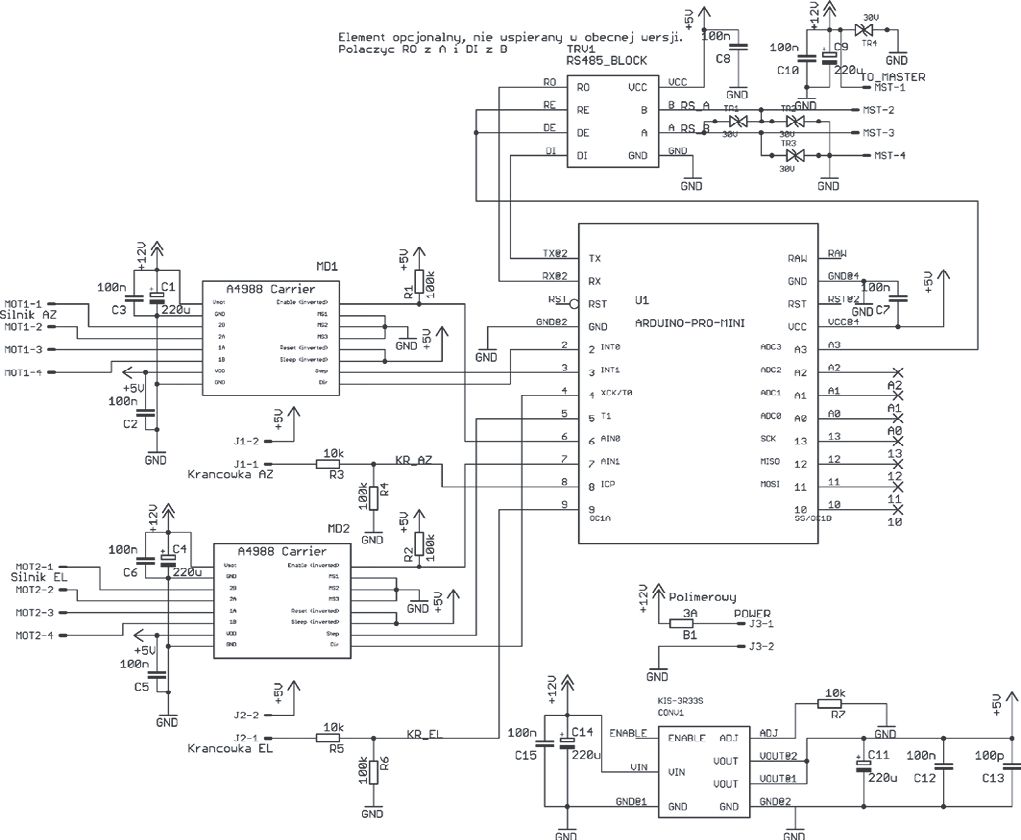
Zaprojektowano i skonstruowano sterownik składający się z modułu wykonawczego sterującego silnikami. Głównymi elemetami są: sterowanie driverami do silników krokowych z regulacją maksymalnego prądu, odczyt pozycji w elewacji z użyciem akcelerometru i w azymucie z użyciem kompasu.
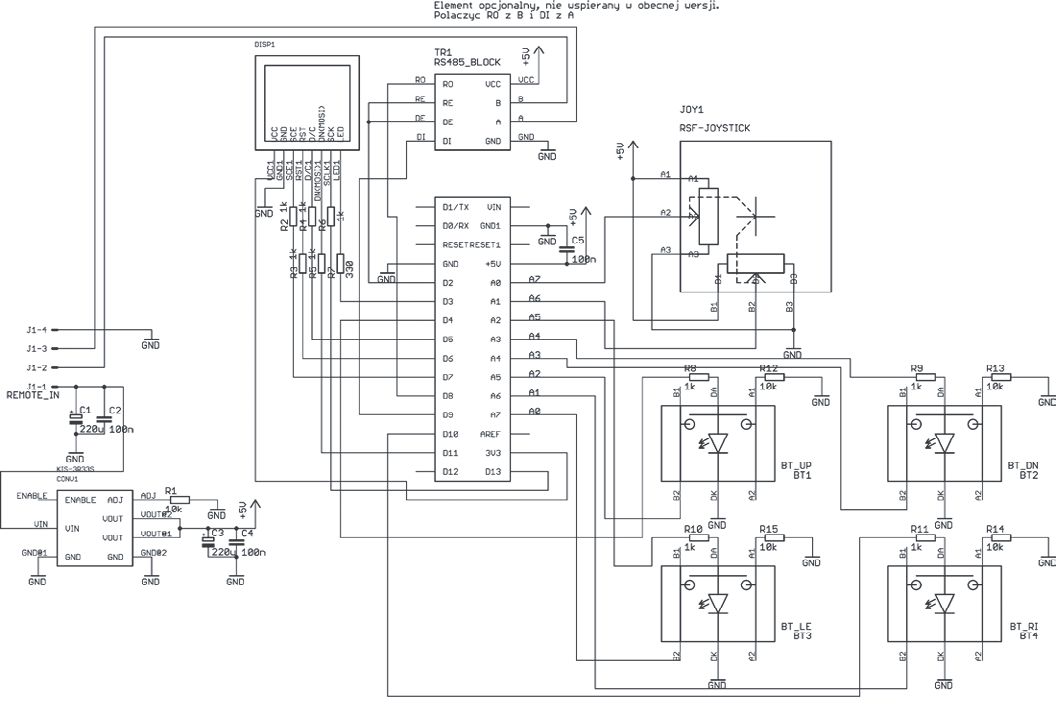
Drugą część stanowi moduł lokalny wyposażony w wyświetlacz LCD, joystick, przyciski sterujące i złącze USB, pozwalające na sterowanie rotorem z użyciem protokołu Yaesu. Oprogramowanie sterownika bazuje na kodzie stworzonym przez Anthony&apos-ego K3NG dla środowiska Arduino (Atmel AVR) i rozwijanego przez krótkofalowców. P
W urządzeniu wykorzystano łatwo dostępne gotowe moduły produkcji chińskiej (przetwornice zasilające, drivery silników, moduły akcelerometru i kompasu itd.).
Bieżące położenie rotora odczytuje się:
- w azymucie - za pomocą kompasu cyfrowego HMC5883L, zrealizowanego na module GY-80 - trójosiowy, 12-bitowy kompas o zakresie pomiarowym do 8,1 gausa.
- w elewacji - za pomocą cyfrowego akcelerometru ADXL345, zrealizowanego na module GY-291, co umozliwia trójosiowy pomiar przyspieszenia w zakresie 2..16 G.
Oprogramowanie modułu sterowania zostało napisane od podstaw. Cyklicznie co 1 sekundę, moduł sterowania odpytuje moduł wykonawczy o bieżące położenie (azymut/elewacja). Informacje te sa wyświetlane na LCD i przekazywane do komputera. Jeśli komputerawyśle komendę nakazującą powrót do określonego położenia, to sterownik na podstawie znanej pozycji biezącej, spowoduje odpowiednie obroty góra/dół, prawo/ /lewo. Następnie kontroluje się, czy pozycja została osiągnięta.
W dowolnym momencie można przejść na sterowanie ręczne, poprzez przyciśnięcie jednego z cztyerech przycisków lub zadanie kierunku joystickiem. Użycie drążka sterującego umożliwia sterowanie prędkością ruchu, któa jest proporcjonalna do wychylenia joysticka.
{kind=link}
{kind=link}